abstract base class for resolution function basis functions More...
#include <resol_fn.h>
Classes | |
| class | Fderiv |
| object holding the basis function and its first two derivatives More... | |
Public Types | |
| enum | FNtype { GENERAL, LINEAR } |
| enumeration of function types: optionally used to improve convergence | |
Public Member Functions | |
| BasisFn_base () | |
| null constructor | |
| BasisFn_base (const int &np) | |
| constructor: takes number of parameters | |
| const int & | num_params () const |
| the number of parameters of this basis function | |
| virtual ftype | f (const HKL &hkl, const Cell &cell, const std::vector< ftype > ¶ms) const |
| the value of the resolution function | |
| virtual const Fderiv & | fderiv (const HKL &hkl, const Cell &cell, const std::vector< ftype > ¶ms) const =0 |
| the value of the resolution function and its first two derivatives | |
| virtual FNtype | type () const |
| the type of the function: optionally used to improve convergence | |
| virtual int | num_diagonals () const |
| number of non-zero diagonals in the upper triangle of the curvatures | |
Protected Member Functions | |
| Fderiv & | result () const |
| provide write access to result for subclasses | |
| virtual | ~BasisFn_base () |
| destructor | |
Detailed Description
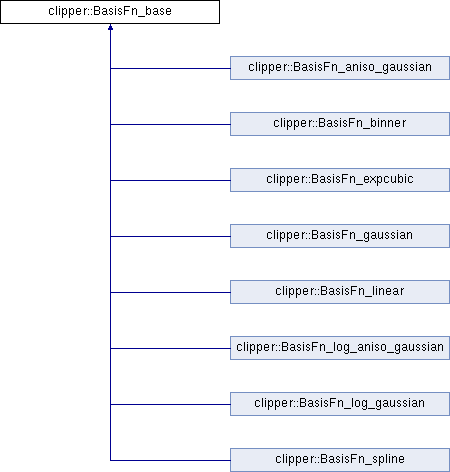
abstract base class for resolution function basis functions
A basis function must be able to return its value and derivatives for any given HKL.
Optionally, performance can be improved by returning a flag to indicate if the value of the basis function for a given reflection is linearly dependent on the values of the parameter, and a value indicating whether the curvature matrix takes an N-diagonal form.
NOTE: for performance reasons the derivatives are returned as a reference to an internal object, so if you store a reference to the result (which is also good for performance, it will be overwritten on the next call. If this matters, store a copy rather than a reference.
Member Function Documentation
| BasisFn_base::FNtype clipper::BasisFn_base::type | ( | ) | const [virtual] |
the type of the function: optionally used to improve convergence
Defaults to GENERAL, which will always work. If the basis function is linearly dependent on the parameters, override this with a function returning LINEAR for improved performance. See the provided basis functions for examples.
- Returns:
- The function type enumeration.
Reimplemented in clipper::BasisFn_binner, clipper::BasisFn_linear, clipper::BasisFn_spline, clipper::BasisFn_log_gaussian, and clipper::BasisFn_log_aniso_gaussian.
Referenced by clipper::ResolutionFn::ResolutionFn().
| int clipper::BasisFn_base::num_diagonals | ( | ) | const [virtual] |
number of non-zero diagonals in the upper triangle of the curvatures
Defaults to 0, which will always work. If the basis function has compact support among the parameters, i.e. the value for any HKL depends only on a few parameters, then set this to the number of non-zero diagonals in the upper triangle of the matrix, i.e. 1 for a diagonal matrix, 2 for a tri-diagonal matrix etc.
- Returns:
- The number of non-zero upper diagonals, or zero for full-matrix.
Reimplemented in clipper::BasisFn_binner, clipper::BasisFn_linear, and clipper::BasisFn_spline.
Referenced by clipper::ResolutionFn::calc_derivs().
The documentation for this class was generated from the following files:
- resol_fn.h
- resol_fn.cpp
